탑메뉴
글로벌 네비게이션








KETI 보유기술

Key Word
웨어러블 재활보조 | 하이브리드 구동기 | 전기 자극기 | 정전 클러치 | 스트레인 센서
기술성숙도(TRL)
5단계 | Pilot규모의 시작품 제작 및 성능 평가
기술개요
전기 자극을 통해 신체 부위의 동작을 유도하고, 정전기력 및 장력(루프 등)을 이용해 해당 부위의 자세를 유지하는 하이브리드 구동기 기술임
기술특징
특허 및 권리현황
| 특허명 | 특허번호 |
|---|---|
| 하이브리드 구동기 | 10-2740525 |
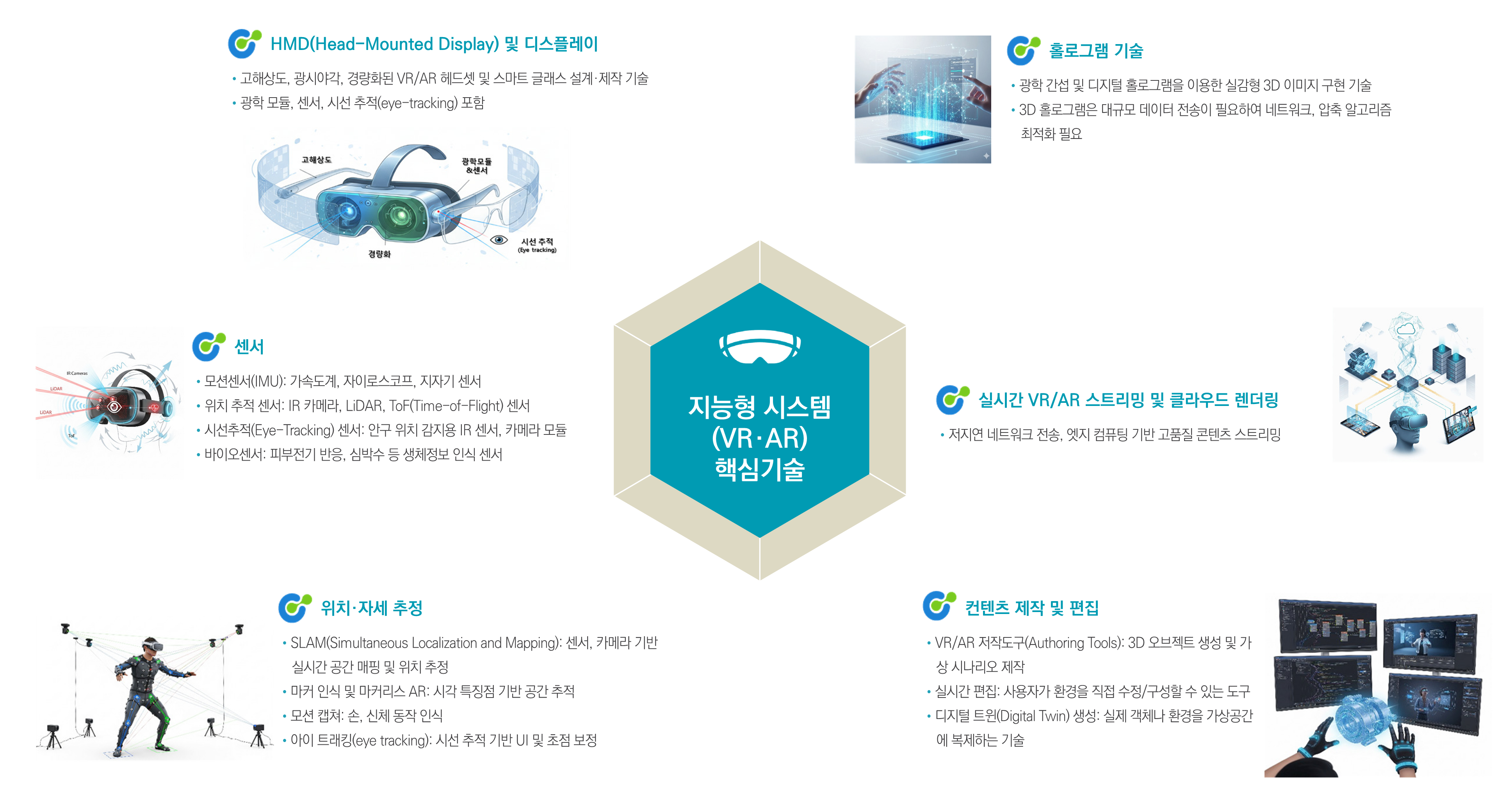
(한국전자기술연구원) AI컨버전스(지능형시스템, 바이오/헬스케어) 기술

(한국전자기술연구원) 산업안전기술
한국전자기술연구원(KETI)은 산업 현장의 사람, 장비, 시스템의 위험 요소를 사전에 식별하고 최소화하기 위한 산업안전 핵심 기술을 보유하고 있습니다. 특히 AI 기반 모니터링, 무인이동체(드론) 조종 및 정밀 측위, 가상 환경을 이용한 위험 대응 훈련 기술 분야에서 강점을 가지고 있습니다.
KETI의 기술은 건설/산업현장, 항공/운송, 해상/항만 및 에너지 플랜트 등 고위험 작업 환경에 적용 가능하며, 실시간 안전 관리와 사고 예방을 목표로 연구되고 있습니다.

백화 현상이 억제된 투명폴리이미드 잉크 적용 디스플레이 패널 및 이를 적용한 전자기기

이송 로봇이 이동형 배터리를 이송하는 전기차 충전 및 전기차 충전 관리 시스템

뱃치 타입 파우더 ALD 장치 및 이의 활용 시스템

작물의 위상과 색상값을 정밀하게 분석하는 작물 특성 분석 장치
온도제어가 가능한 휴대용 열블록 모듈
편광 측정용 균형 광 검출기 및 이를 이용하는 수신기
팔·손의 동작 유도 및 자세유지를 위한 웨어러블 하이브리드 구동기